




1. Valf Əsasının Montaj Prosesindəki Çətinliklər
Bu işdə, digər avtomatik montaj sistemlərinin dizayn təcrübəsi mənimsənildikdən sonra, mövcud yarı avtomatik montaj sistemi təhlil edilmiş və sistemin mexaniki hissəsi tamamilə sistem simulyasiyası əsasında dizayn edilmişdir.klapan nüvəsimontaj prosesi. Sistemin dizayn planında, sistemin etibarlılığını və səmərəliliyini artırmaq üçün mexaniki hissələrin emalını rahat etməyə, xərcləri minimuma endirməyə, hissələrin yığılmasını sadə və asanlaşdırmağa, sistemin müəyyən dərəcədə açıq və genişlənmə qabiliyyətinə malik olmasına çalışırıq. , və sistemin xərc performansını yaxşılaşdırmaq üçün yaxşı zəmin yaradır.
Theklapanəsasmontaj sistemi mexaniki konstruksiyasına görə əsasən üç hissəyə bölünür, yəni: iş dəzgahının yuxarı sol küncündə iki montaj hissəsi, aşağı sol küncündə üç montaj hissəsi və dəzgah hissəsinin sağ tərəfində yeddi montaj hissəsi. İki hissəli montajın texniki çətinliyi sızdırmazlıq halqasının dairəvi formasını necə təmin etməkdir. Kəsmə prosesi zamanı bıçağın eksenel ekstruziya qüvvəsinə məruz qalacaq, buna görə deformasiya etmək asandır. İkincisi, montaj prosesində, ötürücü alət komponentində özlü bir çubuq aşkar edildikdə, vibrasiya vasitəsilə qapı nüvəsinin müxtəlif komponentləri arasında süzgəc və montajı həyata keçirmək lazımdır. Buna görə də, hər bir komponent montaj linkinə çevrilmək üçün müvafiq mövqeyə düşür. Prosesin çətinliyi ondan ibarətdir ki, yuxarıda göstərilən problemlər bu mərhələdə klapan özək qurğusunda qüsurlu məhsul nisbətinin artmasının əsas səbəbləridir. Buna əsaslanaraq, bu sənəd klapan nüvəsinin yığılması prosesini optimallaşdırır və klapan əsas montajının ixtisas dərəcəsini artırmaq üçün keyfiyyət yoxlama sistemi əlavə edir.
2. Ağıllı Valf Əsasının Montaj Sxemi
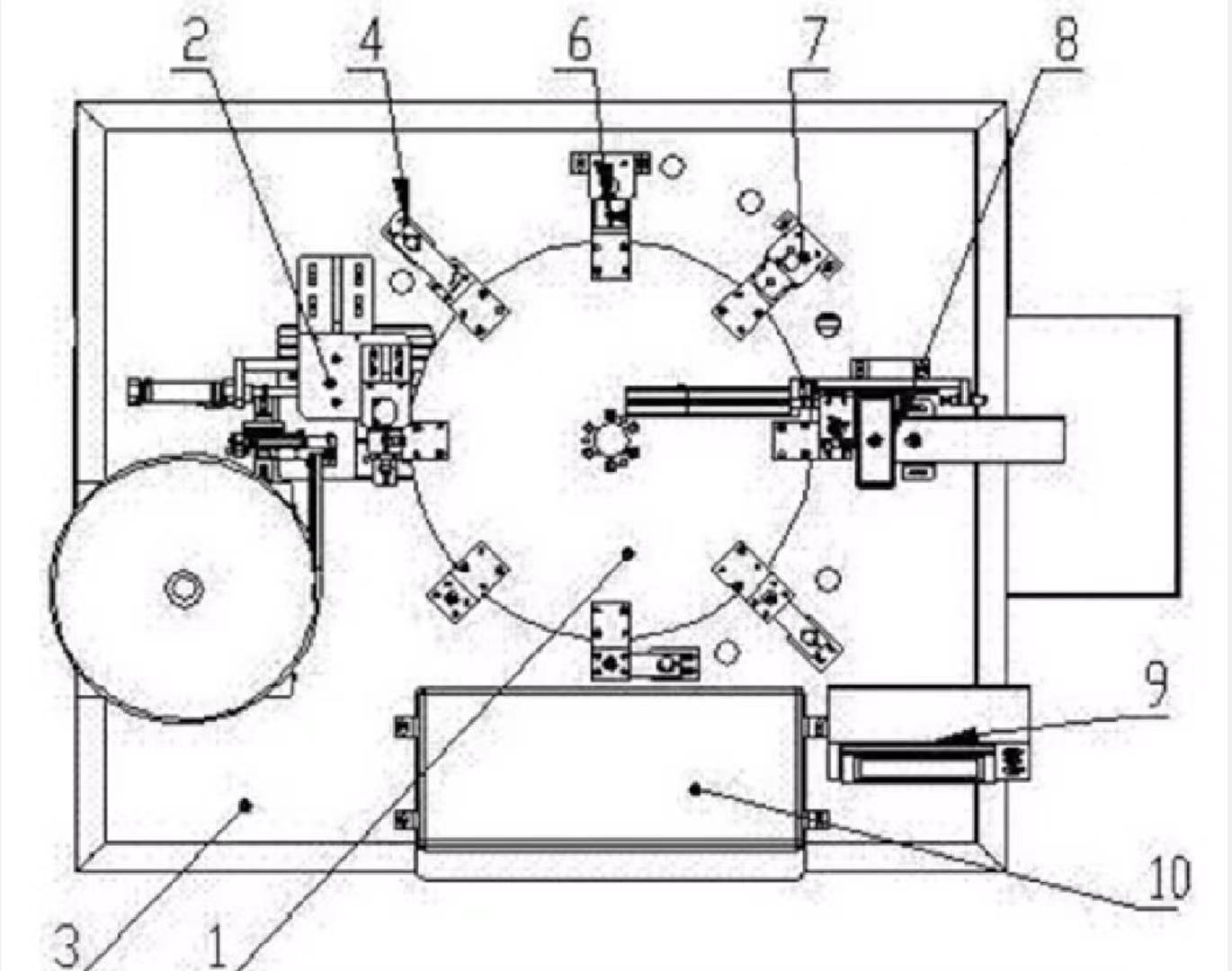
Əməliyyat interfeysi və PLC məntiqi idarəetmə hissəsini təşkil edir və aşkarlama sistemi və PLC montaj sisteminin status məlumatlarını toplamaq və idarəetmə siqnalını çıxarmaq üçün ikitərəfli məlumat axınına malikdir. İcraedici hissə kimi sürücü sistemi birbaşa PLC çıxış hissəsi tərəfindən idarə olunur. Əllə kömək tələb edən qidalanma sistemi istisna olmaqla, bu sistemdəki digər proseslər ağıllı montaj həyata keçirdi. Yaxşı insan və kompüter qarşılıqlı əlaqəsi sensor ekran vasitəsilə əldə edilir. Mexanik dizaynda əməliyyatın rahatlığını nəzərə alaraq, qapının əsas yerləşdirmə qutusu sensor ekrana bitişikdir. Aşkarlama mexanizmi, qapının əsas hissəsinin yuxarı açılması üfürmə komponenti, klapan nüvəsinin hündürlüyünün aşkarlanması komponenti və boşluq mexanizmi müvafiq olaraq, qapı özəyi qurğusunun montaj xəttinin istehsal sxemini həyata keçirərək dönər qabın alət komponenti ətrafında yerləşdirilir. Aşkarlama sistemi əsasən əsas çubuq aşkarlanması, quraşdırma hündürlüyünün aşkarlanması, keyfiyyətin yoxlanılması və s.-ni tamamlayır ki, bu da material seçiminin avtomatlaşdırılmasını və klapan əsas kilidini həyata keçirməklə yanaşı, montaj prosesinin sabitliyini və yüksək səmərəliliyini təmin edir. Sistemin hər bir vahidinin strukturu Şəkil 1-də göstərilmişdir.
Aşağıdakı şəkildə göstərildiyi kimi, dönər masa bütün prosesin mərkəzi halqasıdır və klapan nüvəsinin yığılması dönər masanın sürücüsü ilə tamamlanır. İkinci aşkarlama mexanizmi yığılacaq komponenti aşkar etdikdə idarəetmə sisteminə siqnal göndərir və idarəetmə sistemi hər bir texnoloji blokun işini əlaqələndirir. Əvvəlcə titrəmə diski qapının nüvəsini silkələyir və onu suqəbuledici klapan ağzında bağlayır. İlk aşkarlama mexanizmi, uğursuz materiallar kimi uğurla quraşdırılmamış klapan nüvələrini birbaşa yoxlayacaq. Komponent 6 klapan nüvəsinin ventilyasiyasının uyğun olub olmadığını, 7-ci komponent isə klapan nüvəsinin quraşdırma hündürlüyünün standartlara uyğun olub-olmadığını müəyyən edir. Yalnız yuxarıda göstərilən üç keçiddə uyğun olan məhsullar yaxşı məhsul qutusuna daxil ediləcək, əks halda onlar qüsurlu məhsullar kimi qəbul ediləcək.
Ağıllı məclisklapan nüvəsisistemin dizaynının texniki çətinliyidir. Bu dizaynda üç silindrli dizayn qəbul edilir. Sürüşmə silindri boşalmanın unikallığını təmin etmək üçün boşalmanı idarə edir; ikinci silindr, kilid çubuğunun boşaltma çuxuruna uyğunlaşdırılmasını təmin edir və sonra kilid çubuğuna daxil olan klapan nüvəsini tamamlamaq üçün sürüşmə silindrlə əməkdaşlıq edir və sonra ikinci silindr bütün kilidləmə mexanizmini hərəkət etdirmək üçün itələməyə davam edir və emiş nozzle alətin altına çatdıqda klapanı əməcək. Nəhayət, üçüncü silindr kilidləmə mexanizmini yerinə itələdikdən sonra, servo motor klapan nüvəsinin yığılmasını başa çatdırmaq üçün klapan nüvəsini suqəbuledici klapan ağzına göndərir. Bu proses uzununa və yanal hərəkət mövqelərinin dəqiqliyini və unikallığını təmin edir və qapı özəyinin yığılmasında texniki çətinliklərin yaxşı həllini təmin edir..
3. Klapanın əsas yığma sisteminin əsas komponentlərinin dizaynı
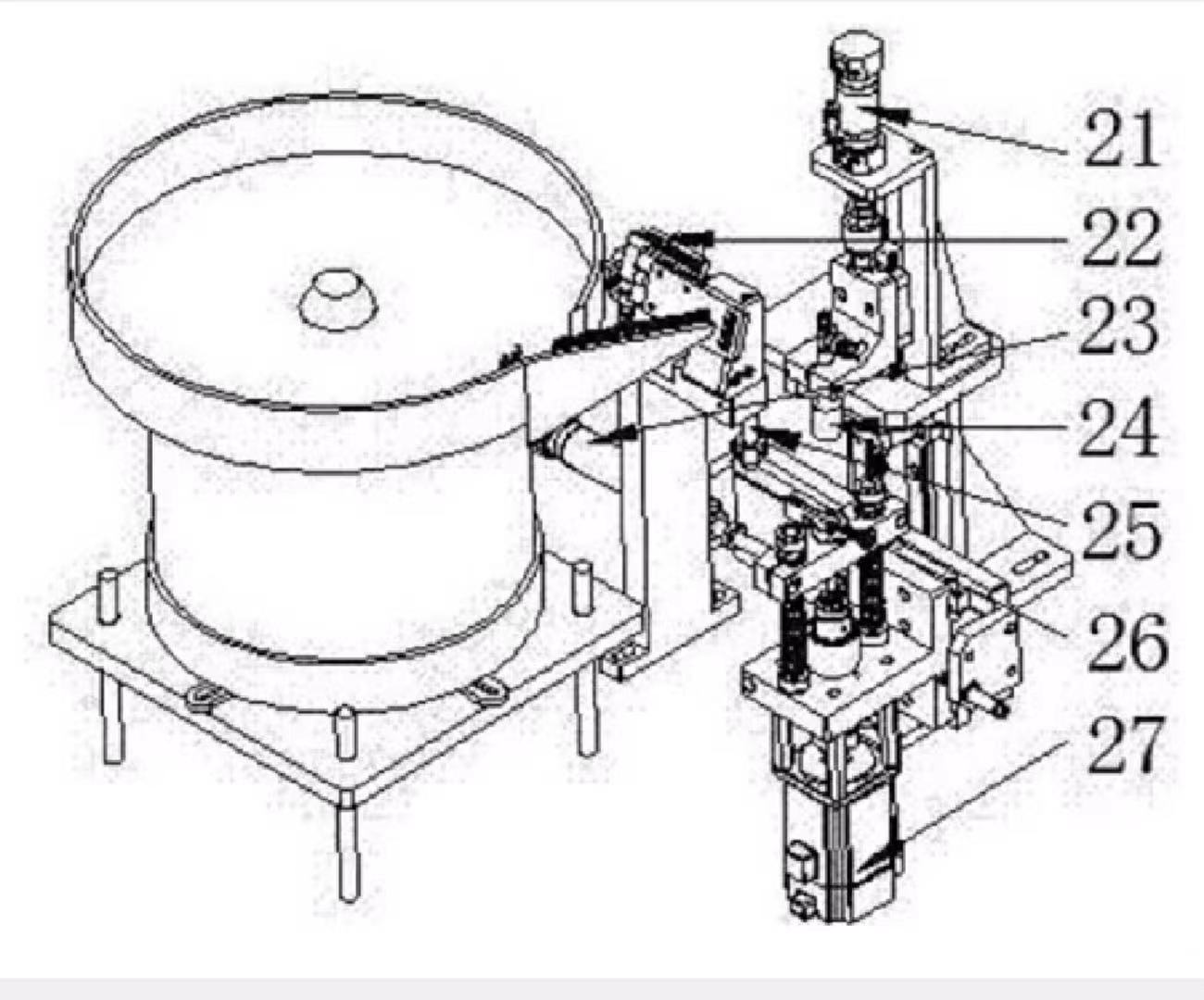
Quraşdırmanın əsas prosesi kimiklapan nüvəsiklapan üzərində, klapan nüvəsinin kilidlənməsi klapan nüvəsinin hərəkət mövqeyinin düzgünlüyünə çox yüksək tələblərə malikdir, buna görə də onu tamamlamaq üçün uzununa və yanal mexanizmlərin koordinasiyası lazımdır. Bu hissənin dizaynında o, tək bir hərəkətə, klapan nüvəsinin boşalma hərəkətinə, kilidləmə qolunun kilidləmə hərəkətinə və klapan nüvəsinin klapan nozzinə yüklənməsinə bölünür. Onun mexaniki quruluşu Şəkil 2-də göstərilmişdir.Şəkil 2-dən göründüyü kimi, klapan özək qurğusunun mexaniki quruluşu üç hissəyə bölünür. Üç hissə bir-birinə təsir etmədən koordinasiyada işləyir. Müstəqil hərəkət başa çatdıqda, silindr növbəti montaj mövqeyinə keçmək üçün mexanizmi itələyir.
Hərəkət mövqeyinin düzgünlüyünü təmin etmək üçün 1,4 mm daxilində xətaya nəzarət etmək üçün elektrik nəzarətinin və mexaniki limitin hərtərəfli dizaynı qəbul edilmişdir. Valf nüvəsi və klapan başlığının mərkəzi koaksialdır, beləliklə servo motor klapan nüvəsini klapan başlığına hamar bir şəkildə itələyə bilər, əks halda bu hissələrin zədələnməsinə səbəb olacaqdır. Mexanik quruluşun dayanması və ya elektrik siqnallarının anormal impulsları montaj işində kiçik sapmalara səbəb ola bilər. Nəticədə, klapan özəyi yığıldıqdan sonra, ventilyasiya göstəriciləri standarta uyğun deyil və montaj hündürlüyü keyfiyyətə uyğun deyil, bu da məhsulun sıradan çıxmasına səbəb olur. Bu amil sistemin dizaynında tam nəzərə alınır, pis məhsulların çeşidlənməsi üçün hava zərbəsinin aşkarlanması və hündürlüyün aşkarlanması istifadə olunur.
Göndərmə vaxtı: Sentyabr-09-2022
